While dynamic programming can be successfully applied to a variety of optimization problems, many times the problem has an even more straightforward solution by using a greedy approach. This approach reduces solving multiple subproblems to find the optimal to simply solving one greedy one. Implementation of greedy algorithms is usually more straighforward and more efficient, but proving a greedy strategy produces optimal results requires additional work.
Activity Selection
Problem
Given a set of activities A of length n
S = <a1, a2, …, an>
with starting times
<s1, s2, …, sn>
and finishing times
<f1, f2, …, fn>
such that 0 ≤ si < fi < ∞, we define two activities ai and aj to be compatible if
fi ≤ sj or fj ≤ si
i.e. one activity ends before the other begins so they do not overlap.
Find a maximal set of compatible activies, e.g. scheduling the most activities in a lecture hall. Note that we want to find the maximum number of activities, not necessarily the maximum use of the resource.
Dynamic Programming Solution
Step 1: Characterize optimality
Without loss of generality, we will assume that the a’s are sorted in non-decreasing order of finishing times, i.e. f1 ≤ f2 ≤ … ≤ fn.
Furthermore, we can define boundary activities a0 such that f0 = 0, and an+1 such that sn+1 = fn.
Define the set Sij
Sij = {ak ∈ S : fi ≤ sk < fk ≤ sj}
as the subset of activities that can occur between the completion of ai (fi) and the start of aj (sj). Clearly then S = S0,n+1, i.e. all the activities fit between the boundary activities a0 and an+1.
Furthermore let Aij be the maximal set of activities for Sij, thus we wish to find A0,n+1 such that |A0,n+1| is maximized.
Step 2: Define the recursive solution (top-down)
Similar to rod cutting, if A0,(n+1) ≠ ∅, then assume it contains activity ak which will divide the set of activities into ones that all finish before sk and ones that all start after fk. Thus we can write the recursion as

and letting c[0,n+1] be |A0,n+1|, i.e. c is the maximal number of compatible activities that start after a0 and end before an+1, we can write the previous recursion as

i.e. compute c[0,n+1] for each k = 1, …, n and select the max.
We can show optimal substructure using a “cut-and-paste” argument by assuming that if c[0,n+1] is optimal, then c[0,k] and c[k,n+1] must also be optimal (otherwise if we could find subsets with more activities that were still compatible with ak then it would contradict the assumption that c[0,n+1] was optimal).
Step 3: Compute the maximal set size (bottom-up)
Substituting i for 0 and j for n+1 gives

Note that Sij = ∅ for i ≥ j since otherwise fi ≤ sj < fj ⇒ fi < fj which is a contradiction for i ≥ j by the assumption that the activities are in sorted order. Thus c[i,j] = 0 for i ≥ j.
Hence, construct an n+2 x n+2 table (which is upper triangular) that can be done in polynomial time since clearly for each c[i,j] we will examine no more than n subproblems giving an upper bound on the worst case of O(n3).
BUT WE DON’T NEED TO DO ALL THAT WORK! Instead at each step we could simply select (greedily) the activity that finishes first and is compatible with the previous activities. Intuitively this choice leaves the most time for other future activities.
Greedy Algorithm Solution
To use the greedy approach, we must prove that the greedy choice produces an optimal solution (although not necessarily the only solution).
Consider any non-empty subproblem Sij with activity am having the earliest finishing time, i.e.
fmin = min{fk : ak ∈ Sij}
then the following two conditions must hold
- am is used in an optimal subset of Sij
- Sim = ∅ leaving Smj as the only subproblem
meaning that the greedy solution produces an optimal solution.
Proof
Let Aij be an optimal solution for Sij and ak be the first activity in Aij
→ If ak = am then the condition holds.
→ If ak ≠ am then construct Aij’ = Aij - {ak} ∪ {am}. Since fm ≤ fk ⇒ Aij’ is still optimal.
If Sim is non-empty ⇒ ak with
fi ≤ sk < fk ≤ sm< fm
⇒ fk < fm which contradicts the assumption that fm is the minimum finishing time. Thus Sim = ∅.
Thus instead of having 2 subproblems each with n-j-1 choices per problem, we have reduced it to 1 subproblem with 1 choice.
Algorithm
Always start by choosing the first activity (since it finishes first), then repeatedly choose the next compatible activity until none remain. The algorithm can be implemented either recursively or iteratively in O(n) time (assuming the activities are sorted by finishing times) since each activity is examined only once.
Example
Consider the following set of activities represented graphically in non-decreasing order of finishing times
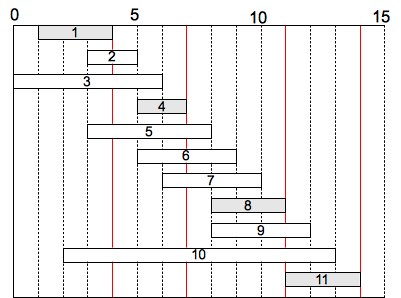
Using the greedy strategy an optimal solution is {1, 4, 8, 11}. Note another optimal solution not produced by the greedy strategy is {2, 4, 8, 11}.
Greedy Algorithm Properties
A general procedure for creating a greedy algorithm is:
- Determine the optimal substructure (like dynamic programming)
- Derive a recursive solution (like dynamic programming)
- For every recursion, show one of the optimal solutions is the greedy one.
- Demonstrate that by selecting the greedy choice, all other subproblems are empty.
- Develop a recursive/iterative implementation.
Usually we try to cast the problem such that we only need to consider one subproblem and that the greedy solution to the subproblem is optimal. Then the subproblem along with the greedy choice produces the optimal solution to the original problem.
Dynamic Programming vs. Greedy Algorithms
Often seemingly similar problems warrant the use of one or the other approach. For example consider the knapsack problem. Suppose a thief wishes to maximize the value of stolen goods subject to the limitation that whatever they take must fit into a fixed size knapsack (or subject to a maximum weight).
0-1 Problem
If there are n items with value vi and weight wi where the vi’s and wi’s are integers, find a subset of items with maximum total value for total weight ≤ W. This version requires dynamic programming to solve since taking the most valuable per pound item may not produce optimal results (if it precludes taking additional items).
Fractional Problem
Assume that fractions of items can be taken. This version can utilize a greedy algorithm where we simply take as much of the most valuable per pound items until the weight limit is reached.
