Concept
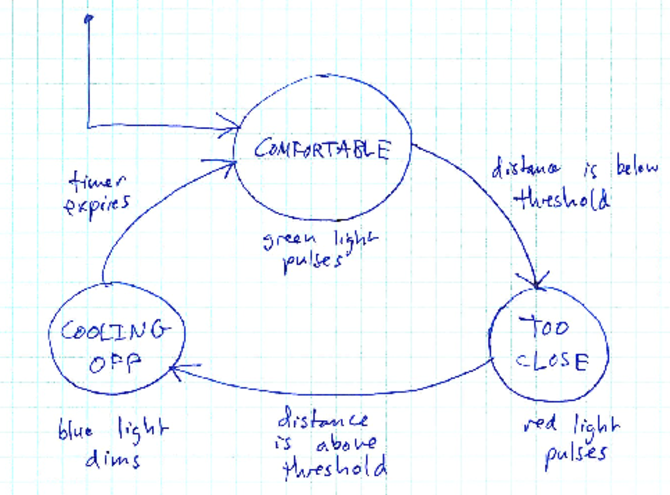
This is an application (using Processing and Arduino) which detects proximity using a range finder. Normally, the system is “comfortable”, and flashes green. If the proximity falls below a threshold, then someone is “too close” and the application reacts by flashing red. When the proximity increases above the threshold again, the system “cools” off (showing blue until a timer expires) and then returns to the “comfortable” state.
Here is the state diagram:
Translating to Processing
Translating a state machine to Processing is pretty easy.
First, we make an enumeration from the system states:
enum State {
COMFORTABLE,
TOO_CLOSE,
COOLING_OFF,
}There is a global (visible to all functions) variable to keep track of the current state:
// Variable to keep track of the current state
State currentState = State.COMFORTABLE; // COMFORTABLE is the initial stateThe draw function of the Processing sketch will look something like this:
State nextState;
switch (currentState) {
case COMFORTABLE:
nextState = exec_COMFORTABLE();
break;
case TOO_CLOSE:
nextState = exec_TOO_CLOSE();
break;
case COOLING_OFF:
nextState = exec_COOLING_OFF();
break;
default:
throw new IllegalStateException("Unhandled state: " + currentState);
}
currentState = nextState;Each state is associated with a function. A state’s function has two responsibilities:
- Generate the outputs for the state
- Read inputs and switch to another state if appopriate
For example, here is the exec_TOO_CLOSE function:
State exec_TOO_CLOSE() {
// Generate outputs
float x = 2.0;
float theta = ticks / x;
float r = ((sin(theta) + 1.0) / 2.0) * 255.0;
arduino.analogWrite(redPin, (int)r);
// Determine next state
State nextState;
if (dist <= THRESHOLD) {
// Stay in TOO_CLOSE state
nextState = State.TOO_CLOSE;
} else {
// Transition to COOLING_OFF state
nextState = State.COOLING_OFF;
// Turn off red
arduino.analogWrite(redPin, 0);
// Set initial coolingOff counter value.
coolingOff = COOLING_OFF_TIME;
}
return nextState;
}Each state function returns the next system state. Note that when a function decides to switch to another state, it may need to do some cleanup and/or initialization to get ready for the next state.
Here is the complete sketch:
